Desde su salida al mercado, el V-Stabi no ha dejado de evolucionar mediante sucesivas actualizaciones gratuitas. Aunque la base siempre ha sido la misma, se ha ido modificando la forma de ajustarlo y se han añadido algunas funciones nuevas. Una vez obtenido un resultado muy bueno, solo admitía una crítica, era necesario un proceso de aprendizaje para poder obtener el máximo del sistema.
|
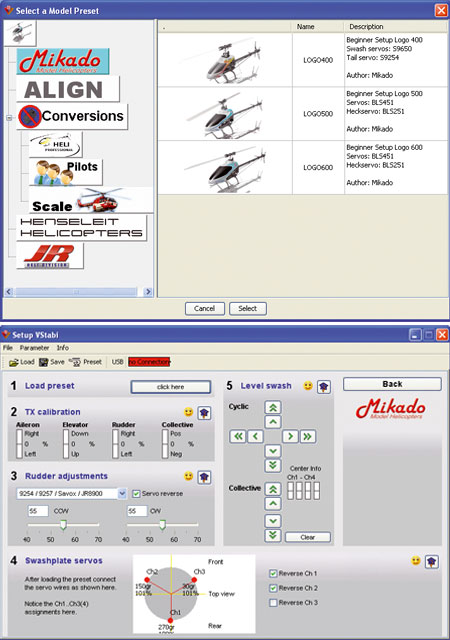
| SET UP. La pantalla de instalación permite ajustar cualquier helicóptero en cinco pasos, ofreciéndonos mayores posibilidades si activamos el modo experto. Por otro lado, se incluyen configuraciones iniciales para un gran número de helicópteros. (Foto: SET UP) |
")
Para remediar esto, se empezó a desarrollar la versión 4 del sistema, cuyo objetivo no es únicamente un nuevo interface de ajuste, sino que ha cambiado todo el diagrama de control, empezando el código desde el principio. La parte más destacable es el proceso de ajuste automático en vuelo, que se irá adaptando a nuestra forma de volar y a la respuesta de nuestro helicóptero. Por ello, el proceso de desarrollo y pruebas en vuelo ha sido bastante intenso, lo que ha llevado a Mikado a cobrar, por primera vez, por una actualización.
Proceso
Para aquellos que tengan la versión 3.6 del V-stabi, es necesario comprar la actualización en la página web de Mikado (www.mikado-heli.de). Para ello, el primer paso consiste en descargarse la versión 4 del programa de ordenador, disponible de forma gratuita en la página de Mikado o en la específica del V-stabi (www.vstabi.de). Una vez instalado, además de la versión para USB, se incluye un programa específico para conexión bluetooth y otro de simulación. Este último nos permite modificar los parámetros del programa sin que éste intente conectarse al V-stabi, siendo de gran utilidad para comparar el setup de nuestro V-stabi con otra configuración, ya que permite abrir los dos programas a la vez.
Para aquellos que tengan un V-stabi con conexión en serie, deberán crear su propio acceso directo eliminando “-u” del destino del acceso directo del programa para USB. Por último, como ocurría en los programas anteriores, es recomendable incluir “-l en” para forzar al programa a utilizar inglés.
Una vez instalado, conectaremos el V-stabi, momento en el cual tendremos que instalar el driver de USB que se incluye en el CD original del V-stabi o que puede descargarse de la web de Mikado. Terminado este proceso, al conectar el V-stabi se nos informará de que la versión de firmware no es compatible y se nos mostrará el número de serie de nuestra unidad. Una vez apuntado nuestro número de serie, podremos comprar la actualización en la web de Mikado.
Programa de ajuste
El nuevo programa consta únicamente de dos páginas. La primera de ellas, nos permite ajustar todos los parámetros que van a afectar al vuelo del helicóptero. Por otro lado, la segunda página nos permite realizar los ajustes básicos del sistema cuando instalamos el V-stabi en un nuevo helicóptero. Este proceso se ha simplificado y consta únicamente de cinco pasos, tras los cuales estaremos listos para realizar nuestro primer vuelo.
En cada apartado del programa, existe la opción de activar el modo experto, donde nos aparecerán todos los parámetros de ajuste disponibles. A pesar de ello, el programa dispone de una cantidad mucho menor de parámetros que la versión antigua. De igual forma, para facilitar el aprendizaje del sistema, cuando pasamos por encima de los diferentes parámetros, nos aparecerá una explicación de su efecto y los valores recomendados en función del tipo de vuelo.
Ajuste inicial
Siguiendo el orden establecido en el programa, el primer paso consiste en seleccionar el “preset” que mejor se ajuste a nuestro helicóptero. Están disponibles varios modelos de Mikado, Align, henseleit, JR, maquetas y varias configuraciones de los pilotos de pruebas. Si nuestro helicóptero no coincide con ninguno de los disponibles, también se incluyen “presets” genéricos para las diferentes configuraciones de plato cíclico. A pesar de ello, todavía no está disponible ninguna configuración a 140º o 135º, aunque sí es posible configurarla mediante las posibilidades que nos permite el software. Existe la opción de convertir la configuración de la versión 3.6 a la nueva versión. Sin embargo, no recomiendo hacerlo, debido a que al cambiar todo el bucle de control, los únicos parámetros que permanecen son los ajustes del CCPM de cíclico y de cola, por lo que es más recomendable empezar con un “preset” de la versión 4.
Una vez seleccionado el “preset”, es necesario ajustar la emisora. Para ello, utilizaremos las barras del segundo paso con la emisora configurada para mezcla mecánica (H1). El objetivo es ajustar el sentido de mando y el recorrido para que coincida con lo que se espera el V-stabi. Utilizaremos el reverse de la emisora para cada uno de los canales. En este punto es necesario aclarar que en el mando de profundidad, “down” significa que el helicóptero baja el morro y “up” significa subir el morro. Es muy importante entender que el sentido de mando de la emisora debe ajustarse para que coincida con lo que espera el V-stabi. Sin embargo, el sentido de mando del cíclico debe ajustarse en el V-stabi y nunca reajustar el sentido de mando de la emisora.
Posteriormente, ajustaremos el centro de la emisora con el subtrim y el recorrido con el ATV para que coincida con el 0% y el 100% del V-stabi. La razón de “calibrar” el recorrido de la emisora se debe a que los valores de mando recomendados en el programa se mantengan con las diferentes emisoras. A pesar de ello, posteriormente podemos ajustar el mando a nuestros gustos con el ATV, dual rate o exponencial. El V-stabi ajusta automáticamente la respuesta en profundidad y alerones, teniendo en cuenta la diferencia de momento de inercia en ambos ejes. Sin embargo, la mayoría de los pilotos están acostumbrados a una respuesta más enérgica en alerones que en profundidad. Por ello, si queremos seguir teniendo un helicóptero “descompensado” en ambos ejes, es posible aumentar el ATV en alerones para obtener una mayor respuesta que en profundidad.
Servo de cola
El tercer paso consiste en el ajuste del servo de cola. Como ya ocurría en la versión anterior, es posible seleccionar cualquier servo del mercado, ya sea digital o analógico, o con diferentes pulsos centrales. De igual forma, ajustaremos el sentido de recorrido y los límites de mando para no forzar el mando. Con el stick centrado, el servo de cola está a mitad de recorrido, por lo que podemos ajustar la cabeza del servo para que forme 90º con la varilla.
Si activamos el modo experto (botón del sombrero académico azul), podemos comprobar el sentido de corrección del sensor de cola, e invertirlo si fuera necesario, y comprobar la optimización de las piruetas. En los sistemas flybarless de dos ejes, que no incluyen giróscopo de cola, tienden a perder la trayectoria durante las piruetas en traslación, dificultando en gran medida las maniobras con piruetas en traslación (wall of death, piro snake) o con cambio de giro (reverse kaos, reverse piro tic toc). Esto es debido a que no hay comunicación entre ambos ejes cuando se realizan piruetas, por lo que la corrección necesaria para mantener la actitud en traslación no se “traslada” al otro eje cuando se realizan piruetas. Sin embargo, en un helicóptero con flybar o con el V-stabi, esa corrección se “traslada” en función del ángulo girado por el helicóptero.
El V-stabi lo soluciona sabiendo el ángulo girado por el helicóptero, gracias al giróscopo de cola, con lo que puede realizar las correcciones oportunas de forma automática, permitiendo traslaciones rectilíneas con giros continuos de cola. Para conseguir este efecto, es imprescindible asegurarse que el sentido de giro del helicóptero coincide con el calculado en el V-stabi. Para ello, nos fijaremos en la representación del helicóptero del menú experto del paso tres, donde el punto rojo es la “cabina” del helicóptero visto desde arriba. Realizaremos giros de 90º con el helicóptero y comprobaremos si el giro realizado por el helicóptero “sintético” coincide con el real. En caso de girar en sentidos opuestos, Debemos invertir la dirección de corrección con la opción que ofrece el programa.
Por último, el V-stabi introduce una corrección en cola cuando aplicamos cíclico o paso para adelantarse al aumento de par necesario. Debemos comprobar que la corrección se realiza en el sentido correcto aplicando cíclico y observando si el rotor de cola aumenta la corrección. En caso contrario, debemos invertir en el programa, sin tocar la emisora, la corrección del sensor de cola, el servo de cola y el stick de la emisora.
El siguiente paso consiste en ajustar el plato cíclico. Si hemos seleccionado el “preset” adecuado, únicamente es necesario conectar los servos según el diagrama que muestra el programa e invertir el recorrido de los servos si fuese necesario. El modo experto nos permite, entre otras opciones, seleccionar entre los distintos tipos de plato cíclico, invertir el sentido de corrección de los giróscopos o seleccionar el tipo de servo entre analógico y digital. En el caso de que nuestro helicóptero tenga el mando de los portapalas por el borde de salida de la pala, será necesario invertir el movimiento de paso con la opción de “collective reverse”. En este apartado, el programa nos da opción de activar el “pitch pump” para agilizar el movimiento de paso. Por último, ajustaremos el “Ciclic Ring” para evitar que se fuerce el mando cuando aplicamos todo el mando cíclico.
En último lugar, el paso cinco nos permite ajustar el centro de los servos de cíclico. El sistema consiste en mover los tres servos a la vez, mediante una especie de trimado, de forma que consigamos centrar los tres servos.
Ajuste final
Previo al primer vuelo, debemos ajustar el paso colectivo que vayamos a necesitar utilizando el deslizador “collective” en la parte del rotor principal. Debido a que cuando ponemos el programa en la primera página se conectan los giróscopos, es importante volver a la pantalla de “setup” siempre que queramos medir los grados de paso o revisar el centrado del cíclico, de forma que los giróscopos no modifiquen la medida.
Para ajustar la respuesta que deseamos obtener en cíclico, solo es necesario ajustar dos parámetros. El primero de ellos es la cantidad de mando que queramos conseguir, mediante el deslizador “agility”. Para obtener una buena aproximación inicial, podemos fijarnos en los valores que nos recomienda el programa en función del tipo de vuelo que vayamos a realizar. Por otro lado, podemos seleccionar la respuesta al stick que queramos obtener entre suave, normal, agresiva o hard 3D.
En el submenú de rotor de cola únicamente es necesario ajustar el mando total de cola que queremos obtener y la ganancia del giróscopo de cola. En el menú experto, debemos ajustar la posición del stick en la que tenemos cero grados, en caso de que ésta no coincida con el centro del stick. Este ajuste se realiza en el parámetro “zero pitch”, presionando “set”.
A diferencia de las versiones anteriores, el V-stabi trae exponencial en el mando de cíclico y cola. Personalmente, recomiendo utilizar el ajuste lineal del programa, de forma que utilicemos la emisora para suavizar el mando.
Ajuste en vuelo
Una de las evoluciones se encuentra a la hora de ajustar el sistema en vuelo. Disponemos de un proceso de trimado automático y, por otro, el sistema posee una serie de optimizadores que permiten ajustarse automáticamente a la respuesta del helicóptero.
Para realizar el trimado automático, es importante esperarse a un día con poco viento, para que éste no afecte al trimado, y tener un centro de gravedad lo más cercano al eje principal. Para poder activar el proceso, el primer paso consiste en activar el modo autotrim. Una vez en el campo de vuelo y con el helicóptero en la posición de despegue, debemos encender el helicóptero con el stick de paso arriba del todo. La activación del autotrim se confirma con un salto doble de paso, a diferencia del simple habitual. Seguidamente debemos bajar el stick de paso rápidamente, debido a que el sistema actúa únicamente cuando el stick está en una posición cercana al estacionario, por lo que en tierra debemos bajar la palanca para que no empiece a trimar. Después de coger vueltas el rotor, debemos poner el helicóptero en estacionario e intentar no tocar los sticks. Cuando el helicóptero empiece a derivar, debemos corregir con cíclico de forma suave, volviendo otra vez a una posición de estacionario y repitiendo el proceso. El objetivo es dejar en estacionario el helicóptero el mayor tiempo posible sin tocas los sticks, utilizándolos únicamente cuando el helicóptero abandone la posición de estacionario, enseñando al sistema la dirección de corrección necesaria. Después de unos 30 segundos con este proceso, debemos bajar el helicóptero lo antes posible y bajar la palanca de paso. Tras apagar el helicóptero y esperar diez segundos, podemos arrancarlo de nuevo con el stick de paso centrado y continuar el vuelo. Al conectarlo al ordenador, nos proporciona una indicación de la bondad del ajuste mediante un semáforo.
En la mayoría de los casos, no es necesario realizar ningún ajuste más, por lo que el V-stabi se convierte en uno de los sistemas más sencillos de ajustar, fundamentalmente porque lo realiza de forma automática. El único ajuste que debemos realizar, es la ganancia del rotor de cola y principal. El rotor de cola se ajusta como cualquier otro giróscopo, mientras que el rotor principal tiene un efecto parecido, subiendo la ganancia para obtener una respuesta más enérgica pero sin oscilar. En la mayoría de los casos, no será necesario modificar su valor por defecto. Dentro del menú experto del rotor de cola, puede sernos útil ajustar el parámetro acceleration, que va a determinar la velocidad de respuesta al stick, tanto en la parada como en el arranque de las piruetas. Para helicópteros con sistemas de transmisión de cola débiles, podemos utilizar valores cercanos a 40. Para obtener una respuesta brusca, podemos aumentar este parámetro hasta 80.
En definitiva, poco más se puede pedir a un sistema flybarless. El ajuste automático facilita claramente el ajuste y lo convierte en un sistema lo más cercano posible al plug&play. Solo hemos elegir qué respuesta y cuánto mando total queremos obtener y dejar al sistema que se autoajuste a nuestro helicóptero.
¿Compensa la actualización? Para aquellos que veían complicada la versión antigua o no dominaban el programa, la actualización es altamente recomendable.
Por Javier Valdeolmos
![]()